




VLSI image/scene recognition systems inspired by brain architecture and robot control using them
-
(Oct. 2012)
We have successfully controlled a service robot for Robocup@home league by
using a face recognition system.
- (Nov. 2007) We have successfully controlled a robot by using a face and arm-posture recognition system. This system uses a merged A/D Gabor filtering LSI and FPGA-base EGM processor LSI.
Face and arm-posture recognition system
Demo scene at BrainIT2007

Demo movie (AVI 9.6MB)
- (March 2006) Combining some processing models inspired by brain vision functions, we are constructing a real-time image/scene recognition VLSI system that can recognize natural scenes including human faces and various objects.
Processing flow for image/scene recognition
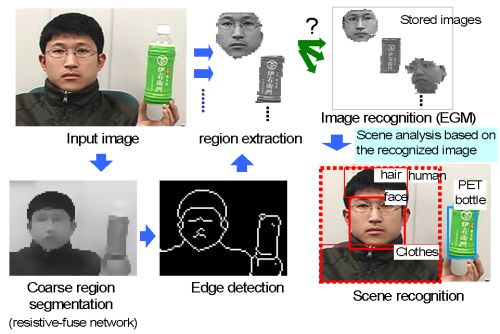
We constructed a real-time image/scene recognition VLSI system that can recognize natural scenes including human faces and various objects. The processing functions used in the system are coarse region segmentation using resistive-fuse networks and image recognition of segmented regions using elastic graph matching (EGM). The scene is understood by using the relationship between segmented regions.
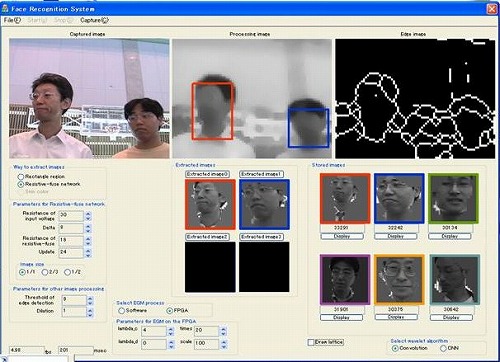
Processing result of the real-time image/scene recognition system (a part of the demo movie)
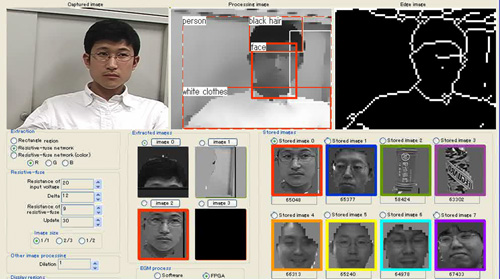
Demo movie(1.3MB); upper left: input image, upper middle: image after coarse region segmentation, upper right: edge image of coarse-region-segmented image, lower-middle: segmented regions (four iamges), lower right: memorized images (eight images). In the upper middle image, the recognized regions are indicated by the color frames, which correspond to those in the memorized images.
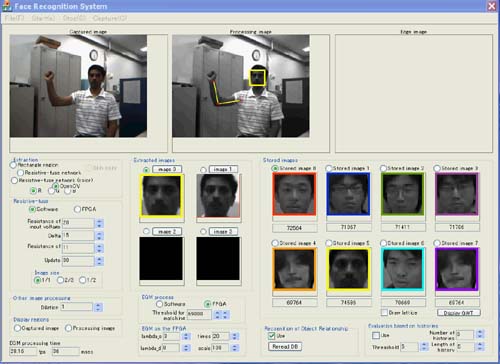
- (Oct. 2004) The elastic graph matching (EGM) algorithm has been implemented in FPGA, and we have constructed a face/object recognition system based on a PC connected with the FPGA board. The clock frequency of the FPGA is 48 MHz, and the FPGA can perform recognition processing with 2.7 ms per memorized image images. The memorized images are stored in the external memory, so there is no limitation of the number of memorized images.
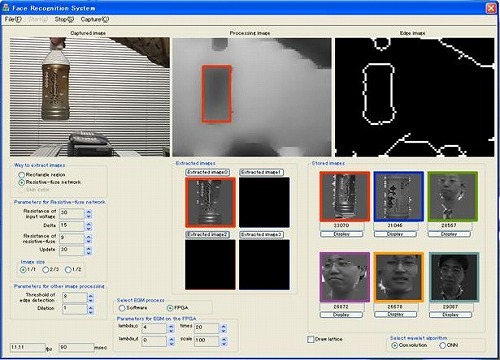
Demo for face recognition
Since our approach uses no specific features of the recognition target, any objects can be recognized. The below example is about recognition of a drinking bottle. The EGM algorithm is suitable for recognition of objects such that they have an internal structure in their images, and they are distorted.
- (Nov. 2007) We have successfully controlled a robot by using a face and arm-posture recognition system. This system uses a merged A/D Gabor filtering LSI and FPGA-base EGM processor LSI.

